
{kind=link}
Extracted / calculated from JPL’s M2020 JSON URL’s for the rover and the helicopter. The JSON URLs are updated after each drive. The helicopter URL is no longer updated as it crash landed during flight 72. If anyone wants the URLs let me know, I can share them here,
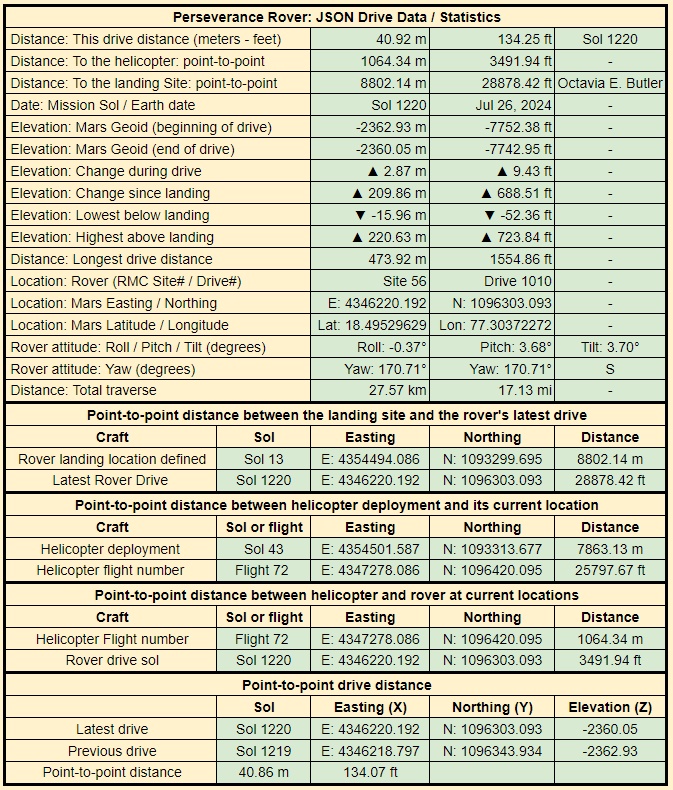
The actual driving distance has to be larger than the point to point distance, since it will not drive perfectly straight with no change in elevation along the way. This number is what I am missing. It should be something like 9000 m if it drove mostly straight. You have the distance of the current “drive” (day?), adding all of those “drives” should give the total driving distance.
OK - I hope I’m with you now? You’re looking for the total traverse distance to compare it with the point-to-point distance? Rather that the last drive distance which I gave you in my last reply?
It’s also reported on the same table as “Distance: Total traverse” The current total traverse distance reported by JPL is 27.57 kilometers (17.13 mile). That value is the distance of the path followed by the rover, and is updated after every drive by JPL. The point to distance (from the rover’s current location to its landing spot is only: 8802.14 meters (8.802 kilometers or 28878.42 ft)
There is a an anomaly in the data provided by JPL, but it is relatively small (percentage wise). When we add up all the individual drives reported by JPL the current total is about 130 meters more than the reported total traverse. I suspect that difference was from when they were performing ‘multi-sol drives’ on the approach to the delta, and a part of one drive got double reported.
AFAIK - Individual drives and the total traverse distance account for the uphill and downhill drives (elevation changes) during each drive as they use data from the wheel revolutions etc, and the inertial measurement instruments that tracks every turn and change in elevation during each drive (That data is also provided on a separate JSON feed that shows the change in elevation at a bunch of points during every drive). I choose to only report the elevation at the beginning and the end of each the drive as well as the elevation change since landing to keep the data on one table.
Oh sorry, it’s in km, I was simply looking for a large number (in meters) and thus missed that value down there.
No problem ☺️ Glad you got sorted.
It used to be in meters and feet, but the feet data eventually exceeded the available space, so I switched to km & mi ☺️