- 896 Posts
- 458 Comments

 4·1 month ago
4·1 month agoThe future path of the rover shows a number of waypoints that are located outside the crater. Once those waypoints have been investigated the team will decide where the rover will explore next. There are many interesting areas inside and outside the crater that will be considered for future exploration. If they decide to re-enter the crater using the same path they used to leave the crater, then the rover would pass close to the helicopter. Maybe they will attempt to make contact and see if it was still gathering the environmental data it was tasked with after it was damaged in it last landing two years ago (January 18, 2024), or maybe just image it from afar to record its condition. Time will tell…
Why are the moon as mirror and better transmission protection algorithms no sufficient ways?
I don’t believe the moon is far away from Earth to act as a reliable relay for Mars - Earth communications.

A number of relay satellites could be parked at different Lagrange points (see attached image), but the cost of such a system would probably not be approved for robotic mission, as all space fairing nations have limited budgets, and robotic missions can just be paused for a few weeks during conjunction.
If extended crewed missions to Mars become a reality, I would think it would be essential to have such a communication system in place if the missions were planned to occur during a Mars-Earth solar conjunction.
You can read one assessment of different relay network topologies to improve Earth–Mars communications on this link - https://www.sciencedirect.com/science/article/pii/S0094576523000516
(The diagram in this reply is copied from the above link)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Rock on, Mars! https://lemmy.world/u/teft@piefed.social
If you have a pair of those old 3D glasses, this will provide a little perspective :)
Credits: NASA/JPL-Caltech/ASU/O.de.Coursac (Posted on Discord)

{kind=link}
{kind=link}
Here’s a copy of the HiRISE image prepared by ‘SpecialSetOfSieves’ that is planned to show additional details of the drives etc in the near future, but this copy shows the new location (small yellow dot, with a large arrow) You’ll need to zoom in full screen to see the annotation)

Here’s the official map, waiting for the next tile to be added to show the detail

ESA’s map

Here’s a close up of the rover’s location after the 30 meter drive to the north.
Credits: NASA/JPL-Caltech/65dBnoise (posted on Mastodon)
The official map is waiting to have this section added in high resolution
The green line is the notional path to the next major science waypoint.

Drive details

{kind=link}
Quite the distance Percy is covering these days. And I am guessing they will have to drive all that back for MSR (if it happens) unless they find a different landing zone.
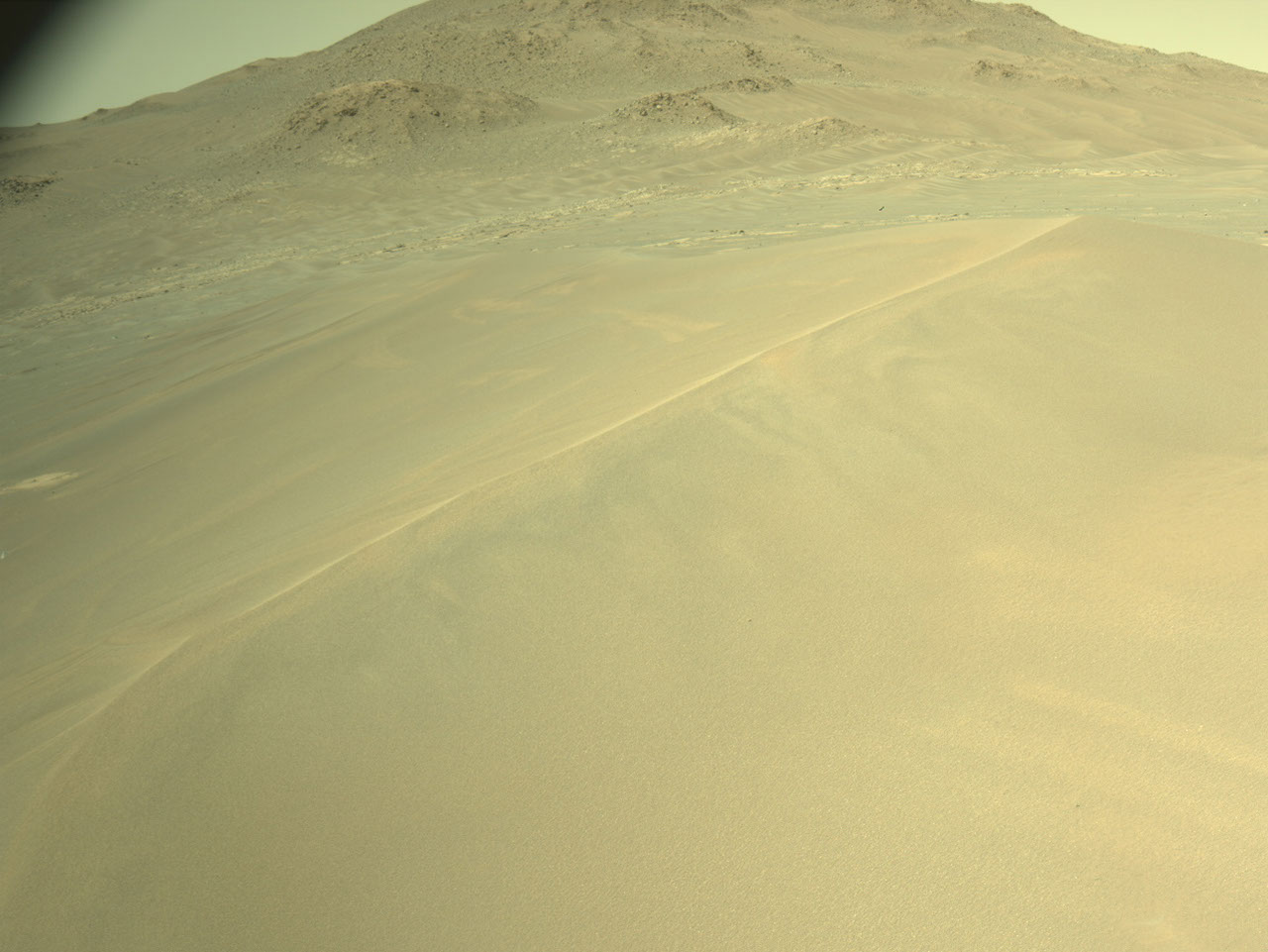
There’s a science waypoint a little further west that they are heading for, but have just detoured with a drive to the north and stopped at a large sandy ripple (it looks like it could be one of the mega-ripples that are found in this region.
I don’t know if they have decided to make a new cache (outside the crater) or return to the first one before leaving all the samples. The first one was close to perfect, and we’ve seen a few potential good ones outside the crater as we have driven around. Looking at the potential life of the rover and its instruments the team are probably split between extending the science operations outside the crater, or returning to explore more or the inside, as we only looked at a relatively small part of the inside. As for MSR, it’s looking dark at the moment, we’ll just have to wait and see.
Maps (with scale bars) showing the path of the drive in yellow


{kind=link}
Was there any discussion about what they were looking for? Or is this just routine?
AFAIK: Nothing has been mentioned, but they’ve acquired a rather large number of images of the window in recent times. I can’t see anything out of place in the images, but there are mechanisms behind the window that I believe are associated with the focus of the RMI camera. MSL had issues with Curiosity’s RMI camera, so I assume they could just be checking it out of an abundance of caution. The RMI camera is still in use, as is the laser, so if there is an issue, it does not seem to be affecting performance.
To show you all is well… Here’s a processed pair of ‘Before and After’ SuperCam RMI’s. These are from Sol 1699 at site 81.4488 looking WNW just before 9 am local mean solar time. Processing was by 65dBnoise and posted by him on Mastodon. You can see the sites of the laser strikes on the ‘After’ image :)
Original (unprocessed images): https://mars.nasa.gov/mars2020-raw-images/pub/ods/surface/sol/01699/ids/edr/browse/scam/LRF_1699_0817755289_604EBY_N0814488SCAM01699_0050I6J01.png https://mars.nasa.gov/mars2020-raw-images/pub/ods/surface/sol/01699/ids/edr/browse/scam/LRF_1699_0817756657_259EBY_N0814488SCAM01699_0100I6J01.png
Credits: NASA/JPL-Caltech/LANL/CNES/IRAP/65dBnoise


{kind=link}
{kind=link}
{kind=link}
Ancient Pac-Man
Can’t unsee now… :)
{kind=link}
4 overlapping images of ‘Phippsaksla’, processed close to ‘natural colours’ Credits: NASA/JPL-Caltech/ASU/MSSS

90% of proceeds go to JPL for mission operations budgets.
Sounds like a good plan to me :)
{kind=link}
Singing Canyon
Singing Canyon has a lovely ring to it :)
Here’s one of the end-of-drive views in front of the rover, captured in this 12 tile HazCam. Image Credit: NASA/JPL-Caltech

The wider view from the rover’s NavCam (mounted high on the mast)
4-tile NavCam

Drive details:

Post-drive map (screenshot) with 200 meter scale bar.

There are a number of dead pixels on some of the rover’s cameras, these are only really noticeable when they capture the sky, these are the reason for the black things in the sky in this image. I’m not seeing the rainbow, but that could be a product of your screen and the processing that was applied to the image before posting.